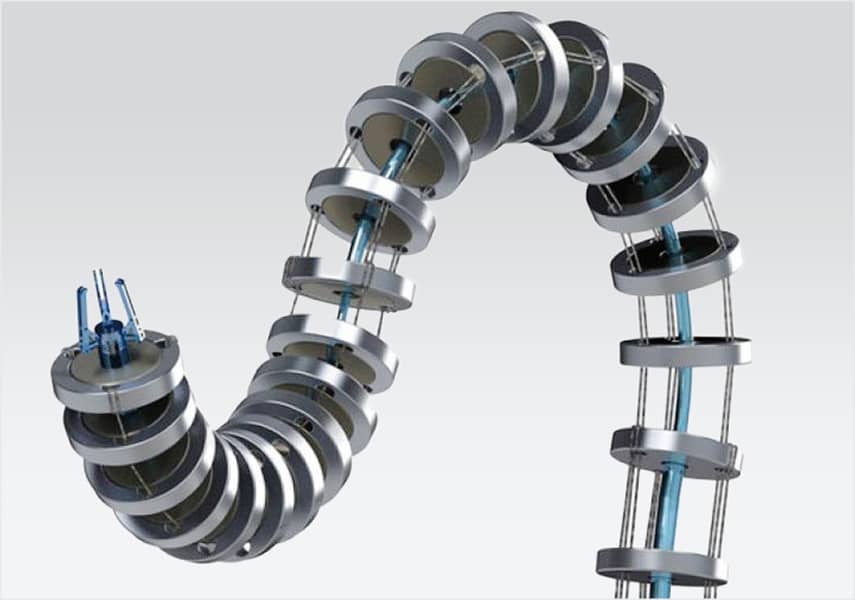
仿生结构
探索面向特殊作业环境的仿生拓扑构型设计,例如仿象鼻柔性臂。核电检查机器人采用磁轮移动平台和柔性机械臂。水电站检修设备设计为蜘蛛式,提升复杂地形适应性。具备高柔性、抗冲击和精准控制能力,适应非结构化环境的多种操作需求,如电力腔体清洁、复杂组件组装等。
自动控制
致力于特种机器人运动控制与规划,如变压器内检机器人的双臂协同和弧门检修装备的自动/手动模式。研究自主作业理论与方法,实现环境感知和智能决策。采用 DWA 融合等先进导航规划技术,保障复杂环境下的精确运动。

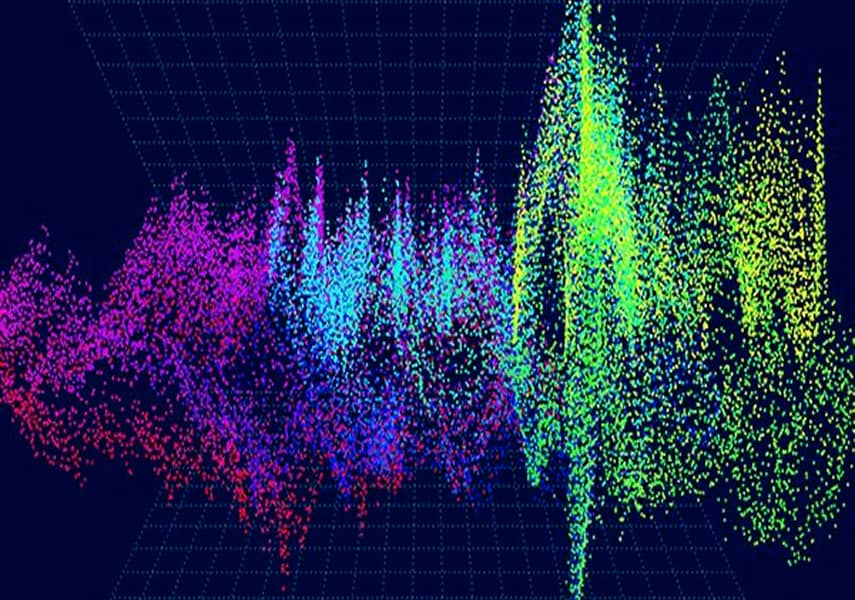
检测感知
研究面向退化环境的精确场景感知与目标检测。广泛应用 YOLO 系列模型进行缺陷检测和安全状态识别。采用多传感器融合技术,提升环境感知的全面性和准确性。利用 SLAM 技术实现未知环境下的自主导航。配备多种传感器进行环境与安全实时监测与预警。